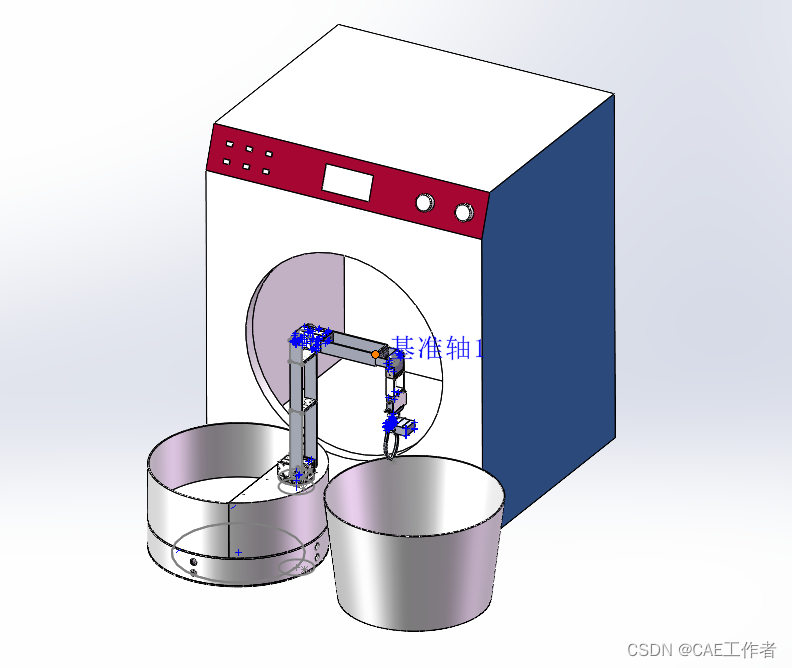
【机器人学习】六自由度机器人轨迹规划+Plot3D仿真
clc;
clear;
close all
L(1)=Link(‘revolute’,‘d’,0.05,‘a’,-0.0195,‘alpha’,pi/2,‘offset’,pi);
L(2)=Link(‘revolute’,‘d’,0,‘a’,0.32,‘alpha’,0,‘offset’,pi/2);
L(3)=Link(‘revolute’,‘d’,0,‘a’,0.23,‘alpha’,0,‘offset’,pi/2);
L(4)=Link(‘revolute’,‘d’,0,‘a’,0,‘alpha’,pi/2,‘offset’,pi);
L(5)=Link(‘revolute’,‘d’,0.25,‘a’,0,‘alpha’,pi/2,‘offset’,0);
Five_dof=SerialLink(L,‘name’,‘4-dof’);
Five_dof.base=transl(0,0,0.2);
Five_dof.teach;
q0=[0 0 0 0 0];
v=[35 20];
w=[-0.5 1.5 -0.5 1.5 0 1];
Five_dof.plot3d(q0,‘tilesize’,0.1,‘workspace’,w,‘path’,‘E:\Project tasks_unfinished2’,‘nowrist’,‘view’,v)
D-H建模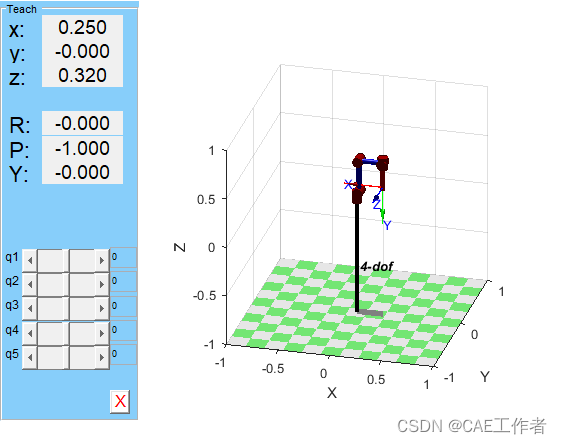
plot3D建模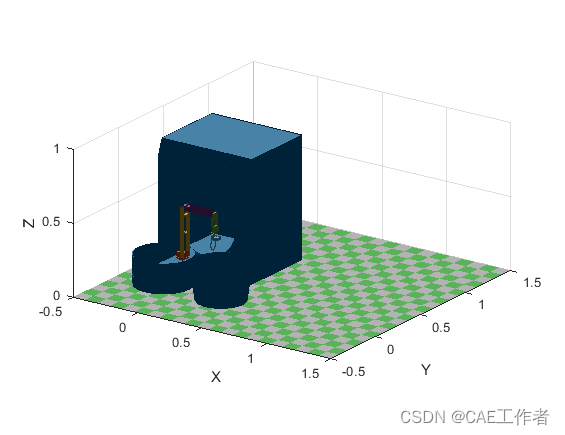
轨迹规划线如下图: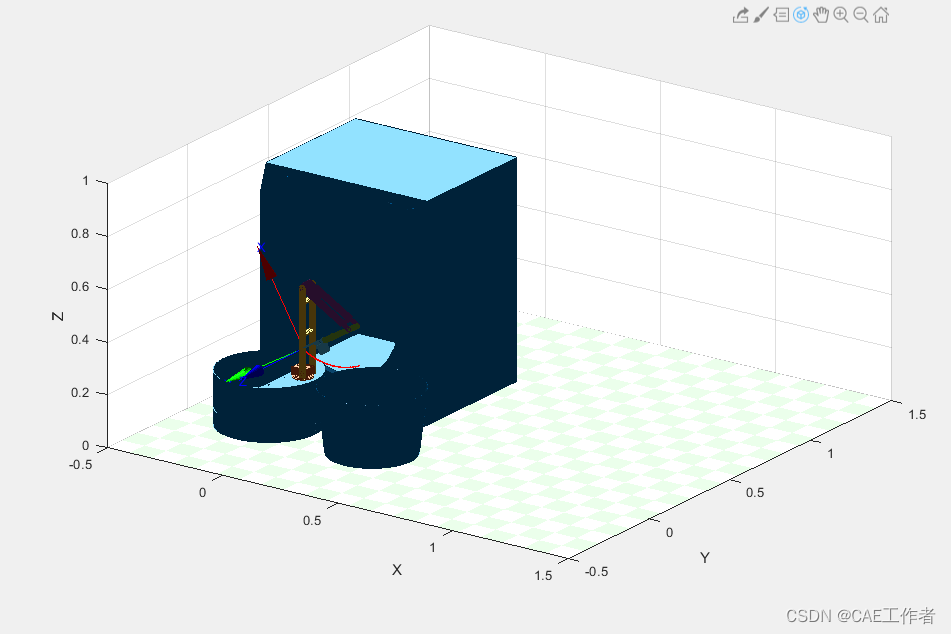
matlab 正逆运动学分析与轨迹规划
该付费内容为:三维模型+urdf文件+matlab代码
包含1个附件 0人购买