基于阿特金森循环的增程式电动车能量控制策略
增程式电动汽车能够通过外接充电的方式获取廉价的电网电能。当动力电池的电量充足时能够以纯电动汽车的方式运行,增程式电动汽车通过增程器来延长纯电动汽车仅由电池驱动导致的较短续航里程。目前混合动力电驱动系中所用的发动机,大多采用传统的奥托循环发动机。在上期推文增程式电动汽车中,我们提到阿特金森循环发动机的热效率较高,燃油经济性较好,越来越多混合动力车采用阿特金森循环发动机。高膨胀比阿特金森循环可以有效提高混合动力汽车发动机的燃油经济性,并通过合理的匹配控制可以获得最优的动力性、经济性和排放性。
E-REV能量管理控制策略是整车控制的关键。国内外对增程式电动汽车控制策略的研究主要分为基于规则的控制策略、基于优化的控制策略和智能控制策略。其中,基于优化的控制策略,如瞬时优化控制策略,全局优化控制策略算法均需要大量的运算,对整车控制系统硬件要求较高,不利于实际应用。近年来,随着智能控制(如模糊控制、神经网络控制等)算法的发展,智能控制策略也被广泛应用于增程式电动汽车的能量管理中,但由于其需要先验知识和复杂的训练过程而难以在实际车辆上应用。目前实车广泛采用基于规则的控制策略。
1.阿特金森发动机工作特点
在阿特金森循环中,在活塞到达下一止点后上升一段时间,进气门在这段时间仍然处于开启状态,有一部分混合气体被推回到进气歧管,降低了实际压缩比。在膨胀行程末,当汽缸内的压力降低至稍高于大气压时,再开启排气气门,提高了膨胀冲程后端的能量利用,压缩比小于膨胀比,如图1,图2为传统发动机与阿特金森发动机配气图解。阿特金森发动机可产生较高的热效率,燃油经济性也较好。
阿特金森循环发动机在低速运行时,进气门晚关闭会使气缸内混合气变少,导致其低速时扭矩较小。虽然长活塞行程能够充分利用燃油的能量,提高经济性,但行程较长也限制了发动机转速的升高,不利于发动机高速运转。阿特金森循环发动机通过控制气门开闭时间实现对膨胀比和压缩比的控制,降低了最高燃烧压力和温度,减少了NOx的排放和泵气损失。

图1 传统发动机配气图解

图2 阿特金森发动机配气图解

2.E-REV动力系统及工作模式
增程式电动汽车的驱动模式可以分为纯电动模式、增程模式纯电动模式下驱动电机独立驱动车辆行驶,发动机不起动,由动力电池提供电力给驱动电机进而驱动车辆;增程模式下增程器启动并处于发电状态,发动机不直接参与驱动,驱动发电机进行发电,产生电能用来驱动电动机,电池处于一同供电驱动或充电状态,如图3示。外接充电模式下车辆利用车载充电机进行充电。

图3E-REV动力系统结构

3.增程式电动汽车控制策略
01
原恒功率控制策略
增程器恒功率控制策略是针对电池的电量SOC进行控制,当电池S0C值小于给定的最小值时,进人增程模式增程器开始工作,发动机工作在效率较高工作区域内的固定工作点上,以恒功率输出,产生的电能一部分提供给电池,另一部分满足汽车功率需求;当电池SOC大于给定的SOC最大值时,增程器关闭,此时电池组给车辆行驶提供能量。在实际工程应用中,一般控制阿特金森循环发动机始终运行在最佳燃油消耗区域内比油耗较低的工作点,如图4中A点所示,红色粗线表示发动机外特性曲线,黑色细线为燃油消耗率曲线。

图4 阿特金森循环发动机燃油消耗MAP图
02
原功率跟随控制策略
在功率跟随控制策略中,增程模式下,增程器作为车辆主要动力来源,增程器输出功率跟随整车的功率需求。当增程器最大输出功率小于整车需求功率时,动力电池作为次级动力源补充不足的功率。这种控制策略与恒功率控制策略相比减少了动力电池的充放电循环次数,有利于延长动力电池的寿命。因为整车需求功率不断变化,阿特金森循环发动机可能工作在高排放低效率的区域,所以需要优化其工作区域。一般将发动机控制在最优工作曲线附近工作。基于阿特金森循环发动机的燃油消耗图确定了发动机最优工作曲线,如图5中虚线所示。

图5 阿特金森循环发动机最优工作曲线
03
增程器三工作点控制策略
恒功率控制下电池经常大电流充放电,对电池寿命不利。增程器多工作点控制策略的思想是选取多个燃油效率较高的点作为增程模式下发动机的工作点,工作点的选择应结合车辆日常行驶的平均需求功率、最大需求功率和发动机燃油消耗曲线等进行设定,基于动力电池SOC、整车需求功率选择最优的工作点。结合发电机效率图、发动机燃油消耗曲线等确定发动机工作点如图6所示.其中小方块从左到右依次为工作点1,工作点2和工作点3。
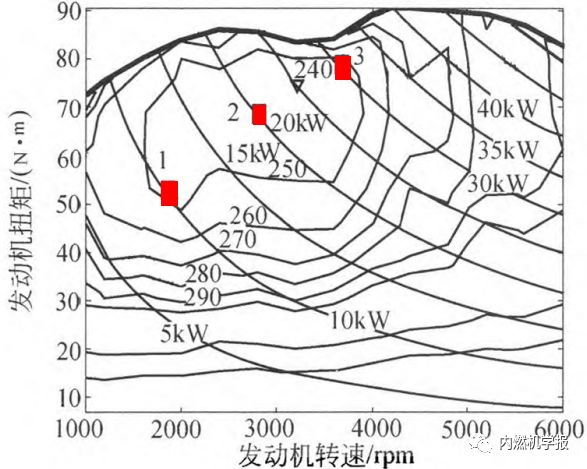
图6 三工作点控制策略工作点的分布
04
基于转速切换的功率跟随控制策略
能量管理控制策略的目标是优化阿特金森循环发动机的工作区域,提高其燃油效率,降低排放。车辆行驶过程中,工况不断变化,车辆的需求功率波动范围也较大,传统的功率跟随控制策略必须根据整车需求功率的实时变化来调整发动机的转速。并且频繁的发动机转速的调整和发动机转速波动会影响阿特金森循环发动机的油耗和排放。为解决这一问题,北京交通大学张昕等提出了基于转速切换的功率跟随控制策略,在阿特金森循环发动机的功率输出范围内,划分出7个子区间,如图7所示。根据燃油消耗曲线及功率子区问范围选择区间中点的阿特金森循环发动机转速作为该功率区间的发动机目标转速。
图7 功率-转速切换图
总结
1)增程器三工作点控制策略与恒功率控制策略相比,电池平均充电电流减小了54%,有利于电池寿命,并且油耗降低了3%。
2)与恒功率控制策略相比,基于转速切换功率跟随控制策略的燃油经济性提高了6%.与功率跟随控制策略相比有效地缓解了阿特金森循环发动机转速的频繁波动。
[1]牛继高,司璐璐,周苏.增程式电动汽车能量控制策略的仿真分析[J].上海交通大学学报,2014,(1):140-145.
[2]张昕,吴建政,宋雯, 等.基于阿特金森发动机的增程式电动汽车控制策略匹配设计[J].北京交通大学学报,2017,(4):98-103.
[3]付中伟,滕勤,刘青林.阿特金森/米勒循环发动机的技术与应用[J].小型内燃机与车辆技术,2017,(5):75-82.





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




