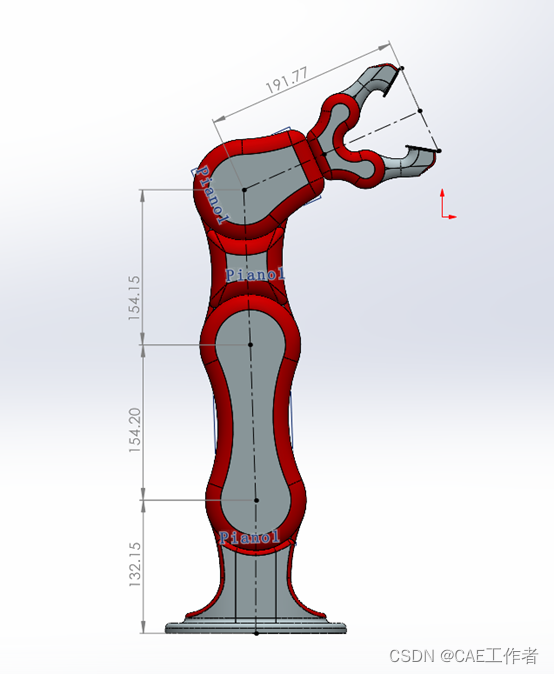
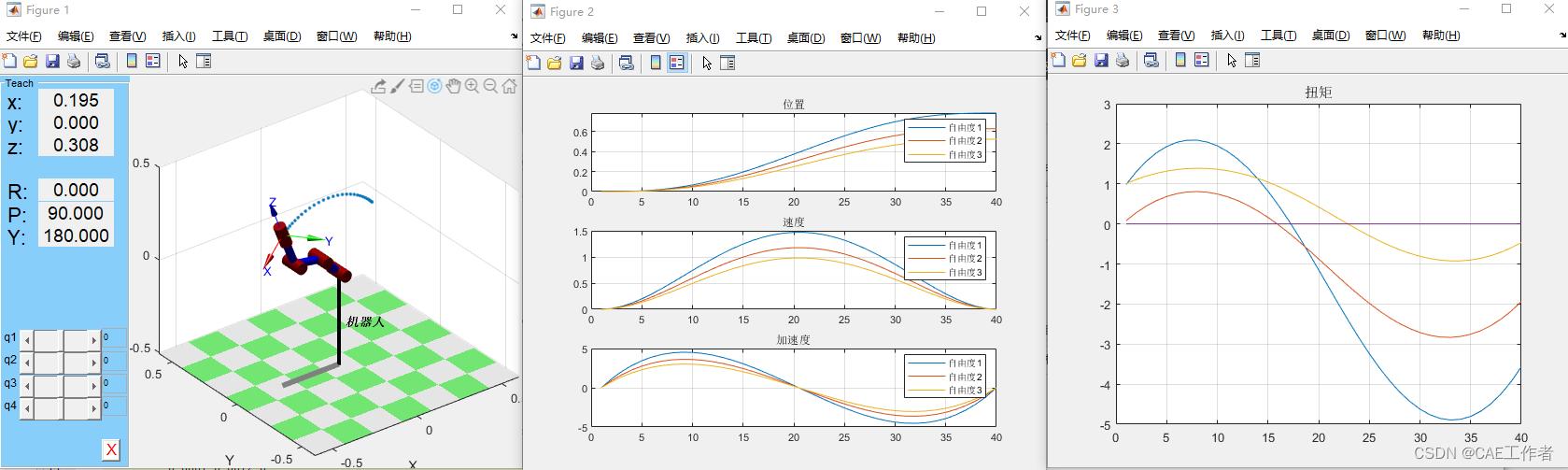
【机器人学习】四自由度机械臂运动学轨迹规划分析+运动空间分析+动力学分析(三维模型+matlab代码
clear;
clc
close all
% theta d a alpha qlim offset
L(1) = Link( 'd', 0 , 'a' , 0 , 'alpha', pi/2 ,'offset',pi/2,'modified');
L(2) = Link( 'd', 0 , 'a' ,0.15420 , 'alpha', 0 , 'offset',0,'modified');
L(3) = Link( 'd', 0 , 'a' , 0.15415 , 'alpha', 0 , 'offset',0,'modified');
L(4) = Link( 'd', 0.19544, 'a' , 0, 'alpha', pi/2 , 'offset',0,'modified');
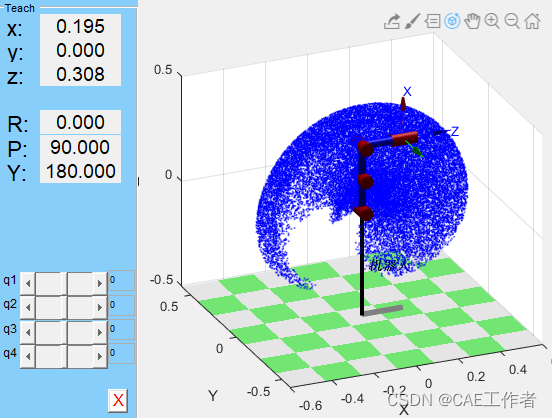
robot = SerialLink(L, 'name' , '机器人'); %建立三自由度模型
robot.display(); %显示建立的机器人的DH参数
% h=0.5;
% robot.plotopt = {'workspace',[-0.3,h,-0.5,0.5,-0.2*h,h]}; %设置模型空间大小和地砖大小
robot.teach; %画出模型并进行调控
%%
%标准D-H法
% function [ T ] = trans( theta, d, a, alpha )
% T =[
% cos(theta), -sin(theta)*cos(alpha), sin(theta)*cos(alpha), a*cos(theta);
% sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
% 0, sin(alpha), cos(alpha), d;
% 0, 0, 0, 1 ];
% end
其他代码见下载链接
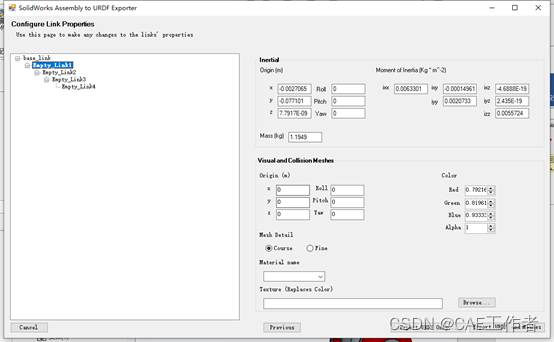
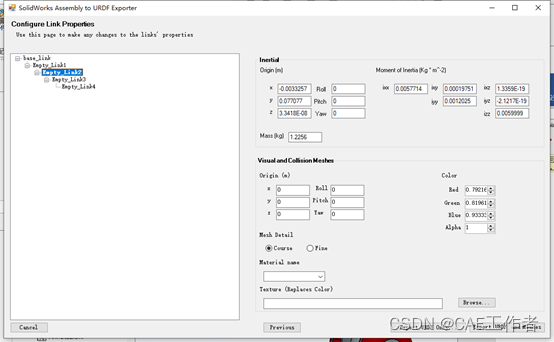
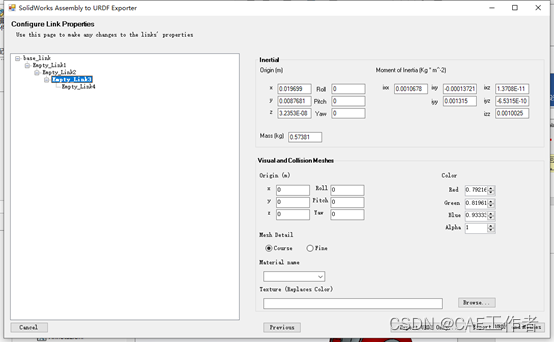
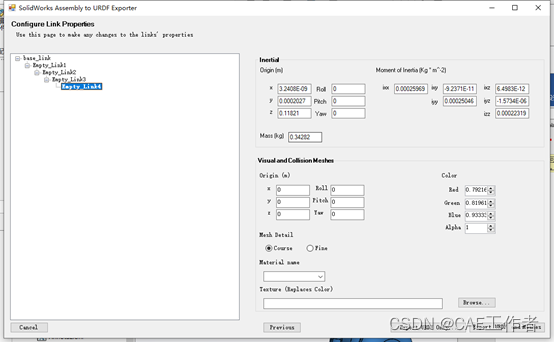
以下是动力学分析参数,由solidworks导出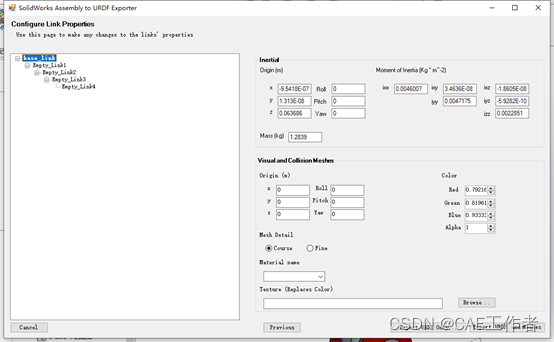
clear;
clc
close all
% theta d a alpha qlim offset
L(1) = Link( 'd', 0 , 'a' , 0 , 'alpha', pi/2 ,'offset',pi/2,'modified', ...
'I', [0.0063 0 0;
0 0.0020 0;
0 0 0.0055], ...
'r', [-0.0027 -0.0771 0], ...
'm', 1.1949);
L(2) = Link( 'd', 0 , 'a' ,0.15420 , 'alpha', 0 , 'offset',0,'modified', ...
'I', [0.0057 0.0001 0;
0.0001 0.0012 0;
0 0 0.0059], ...
'r', [-0.0033 0.0770 0], ...
'm', 1.2256);
L(3) = Link( 'd', 0 , 'a' , 0.15415 , 'alpha', 0 , 'offset',0,'modified', ...
'I', [0.0010 -0.0001 0;
-0.0001 0.0013,0;
0 0 0.0010], ...
'r', [0.0196 0.0087 0], ...
'm', 0.5738);
L(4) = Link( 'd', 0.19544, 'a' , 0, 'alpha', pi/2 , 'offset',0,'modified', ...
'I', [0.0002 0 0;
0 0.0002 0;
0 0 0.0002], ...
'r', [0 0.0002 0.1182], ...
'm', 0.3428);
robot = SerialLink(L, 'name' , '机器人'); %建立三自由度模型
robot.display(); %显示建立的机器人的DH参数
% h=0.5;
% robot.plotopt = {'workspace',[-0.3,h,-0.5,0.5,-0.2*h,h]}; %设置模型空间大小和地砖大小
robot.teach; %画出模型并进行调控%%
%,具体见附件代码
以下内容为付费内容,请购买后观看
三维模型+matlab代码





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




