仿真科普 | 低空经济的“数字风盾”:CFD+数字孪生构建智慧风场仿真体系
 2026年5月29日 12:07
2026年5月29日 12:07![[媒介版头2026].gif](https://bexp.135editor.com/files/users/1466/14660444/202605/7MXqbENR_zRpX.gif?auth_key=1780243199-0-0-bd437c9c8be9d0610d708cf765a0517a)
随着低空经济被纳入国家战略性新兴产业,城市低空空域的商业化运营正在从构想走向现实。然而,一个被长期低估却至关重要的技术瓶颈逐渐浮出水面——城市低空风场的复杂性与不确定性,已成为制约飞行器安全、能耗与运营效率的核心因素。
无人机三维路径规划场景(图源网络)
本文将从风场仿真与低空经济的交叉技术体系出发,系统阐述计算流体力学、大气边界层模拟、风洞验证等技术如何为低空航线规划提供科学支撑,并介绍面向这一新兴领域的工程化解决方案。
01 风场仿真与低空经济的交叉技术体系
风场仿真与低空经济的深度融合,本质上是在传统的流体力学仿真框架下,引入低空飞行器气动特性与城市地理环境两大新变量。这一交叉技术体系由以下五个核心模块构成。
1.计算流体力学(CFD)仿真
CFD是风场仿真的底层核心技术。通过在三维空间中对纳维-斯托克斯方程进行数值离散与求解,可以获取任意位置的风速、风向、湍流强度等关键参数。在低空经济场景中,CFD仿真需要覆盖从百米尺度的城市街区到米级尺度的飞行器周围流场,对计算精度与效率提出了双重挑战。
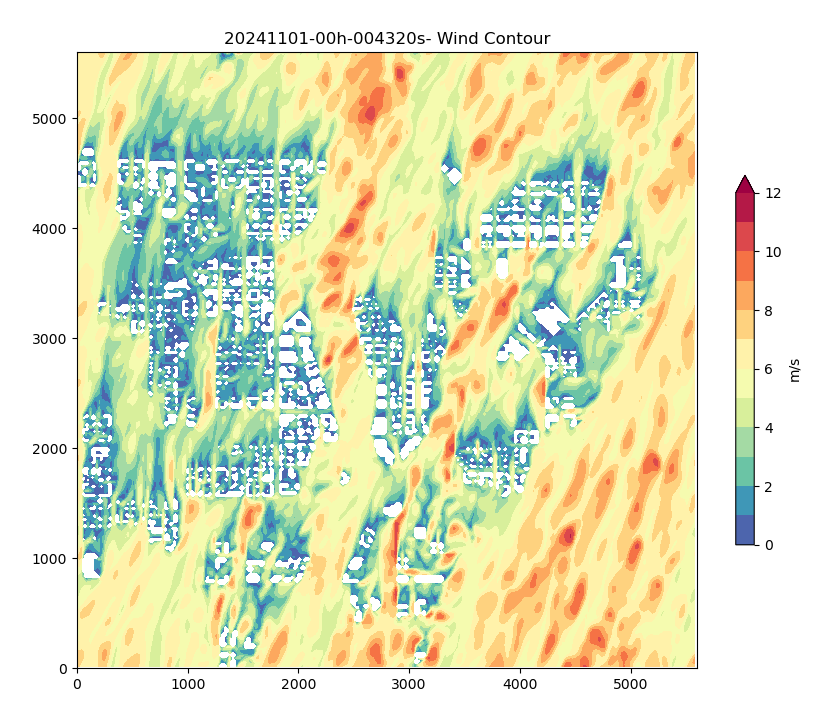
某研究区域的10m高度风场图,水平空间分辨率为10m
(图源网络)
2.大气边界层风场模拟
低空飞行器主要活动于大气边界层内(地表至约1km高度)。这一区域的风场受地表粗糙度、热力stratification(层结状态)、地理地形等因素强烈影响,呈现出显著的时空不均匀性。大气边界层风场模拟需要将气象学中的边界层参数化方案与CFD方法耦合,实现对不同稳定度条件下风廓线、湍流结构的准确刻画。
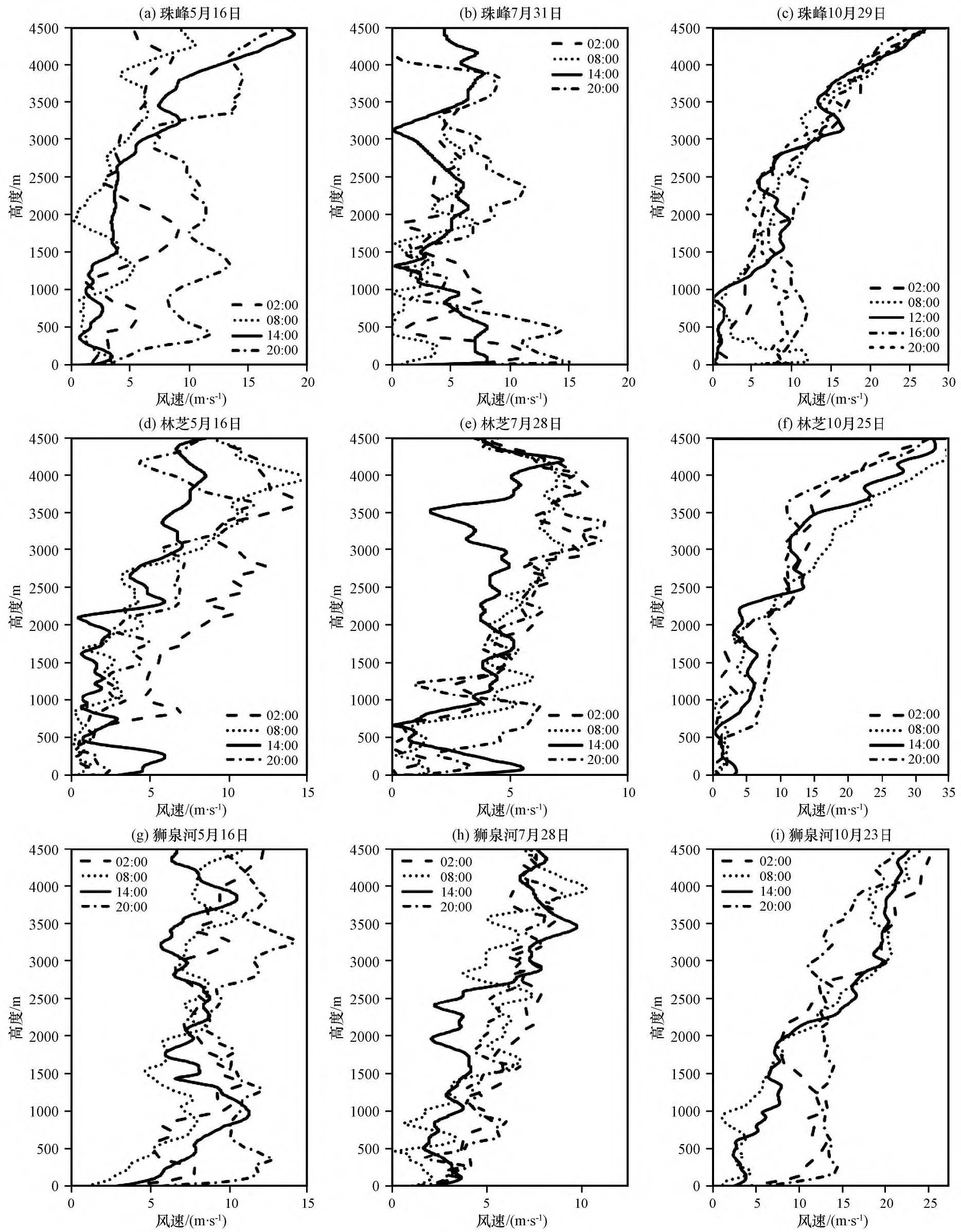
某研究区域风廓线(图源网络)
3.城市建筑绕流与湍流仿真
城市环境中,建筑群对来流产生阻塞、绕流、峡谷加速等效应,形成极为复杂的局部风场特征。例如,两栋高层建筑之间可能产生“文丘里效应”导致风速骤增,建筑背风面则形成大范围低速回流区。这些特征的空间尺度仅为数米至数十米,却直接影响飞行器在该区域的姿态稳定与能耗表现。城市建筑绕流仿真需要在CFD模型中精确刻画建筑几何,并采用大涡模拟等高级湍流模型解析小尺度涡结构。

高层建筑物间的文丘里效应(图源网络)
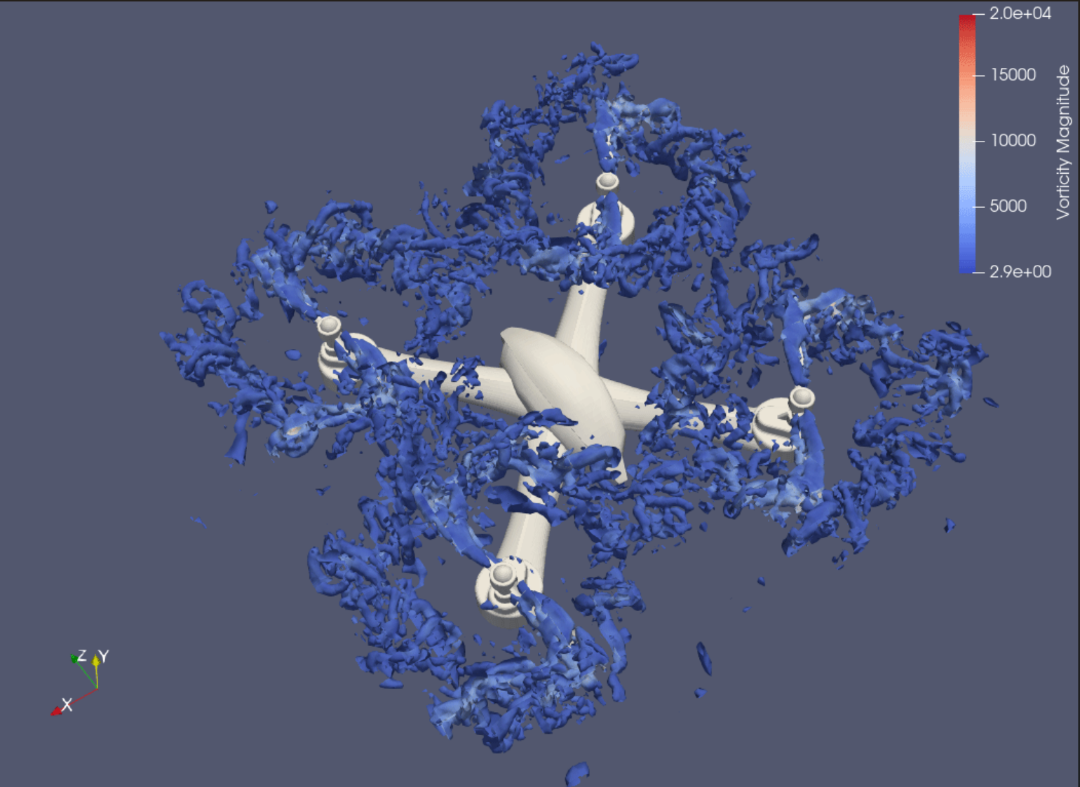
4.无人机气动特性仿真
无人机自身的气动特性决定了其对风场扰动的响应方式。通过求解飞行器周围流场,可以获得不同迎角、侧滑角下的升力、阻力、力矩系数,进而建立飞行器的动力学模型。在多旋翼与固定翼两类主要构型中,前者受风场影响时需考虑旋翼与机身的气动干扰,后者则需要关注机翼表面分离流与失速特性。

无人机整机气动仿真云图(图源网络)
5.风洞物理试验与数字孪生验证
物理风洞试验是验证仿真精度的“金标准”。通过在风洞中缩比复现典型风场条件,测量飞行器模型的气动响应,可以与CFD仿真结果进行交叉校验。在此基础上,数字孪生技术进一步将物理风洞与仿真模型实时联动,形成“仿真—试验—修正”的闭环迭代体系,有效提升风场预测与航线规划的可信度。

无人机风洞试验(图源网络)
02 风场仿真技术在低空经济领域的应用
基于上述技术体系,风场仿真正从底层重构低空经济的五大核心场景,实现“被动避障”到“主动能效优化”的跨越。
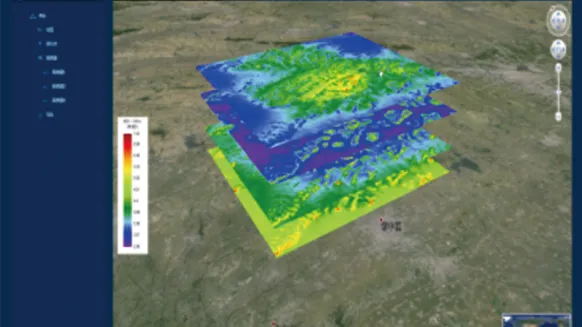
1.城市低空空域风环境评估
不同城市、不同区域、不同高度的风环境特征差异显著。通过建立城市尺度的CFD模型,输入长期气象观测数据,可以绘制出“低空风环境地图”,标注出不同坐标、不同高度的平均风速、阵风系数、湍流强度等关键指标。该地图可作为低空空域划设、飞行风险分级的量化依据,避免将所有空域“一刀切”管理。
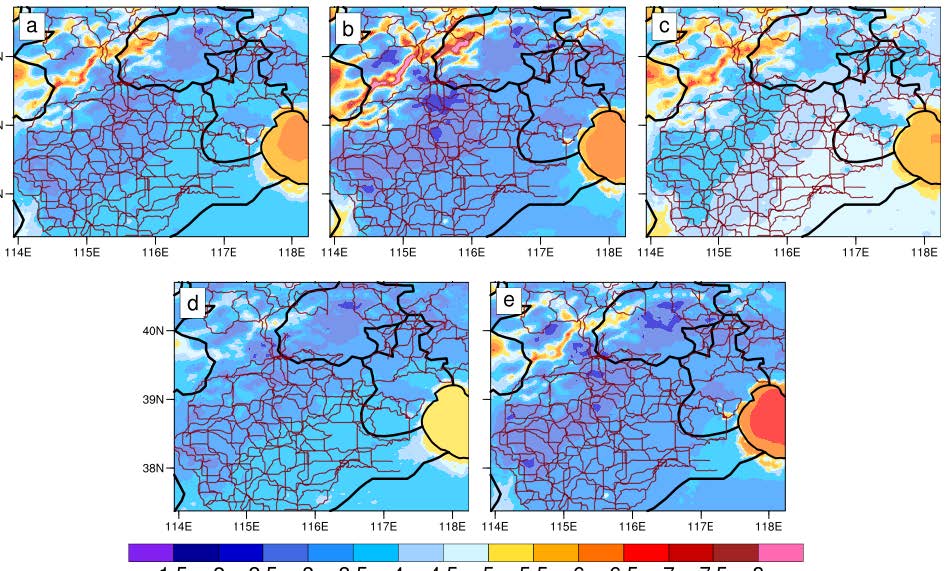
京津冀地区航路网及2015-2019年10m风速分布特征
(图源网络)
2.起降场选址与风环境分析
垂直起降场是eVTOL与无人机物流网络的节点设施,其选址需综合考虑地面条件、空域资源与风环境。CFD仿真可用于评估候选场址在主导风向下的起降气流平稳度,识别是否存在建筑物引起的侧风、下洗流等不利因素。在风环境不理想的场址,可通过调整起降平台朝向、增设导流设施等手段进行工程补偿。
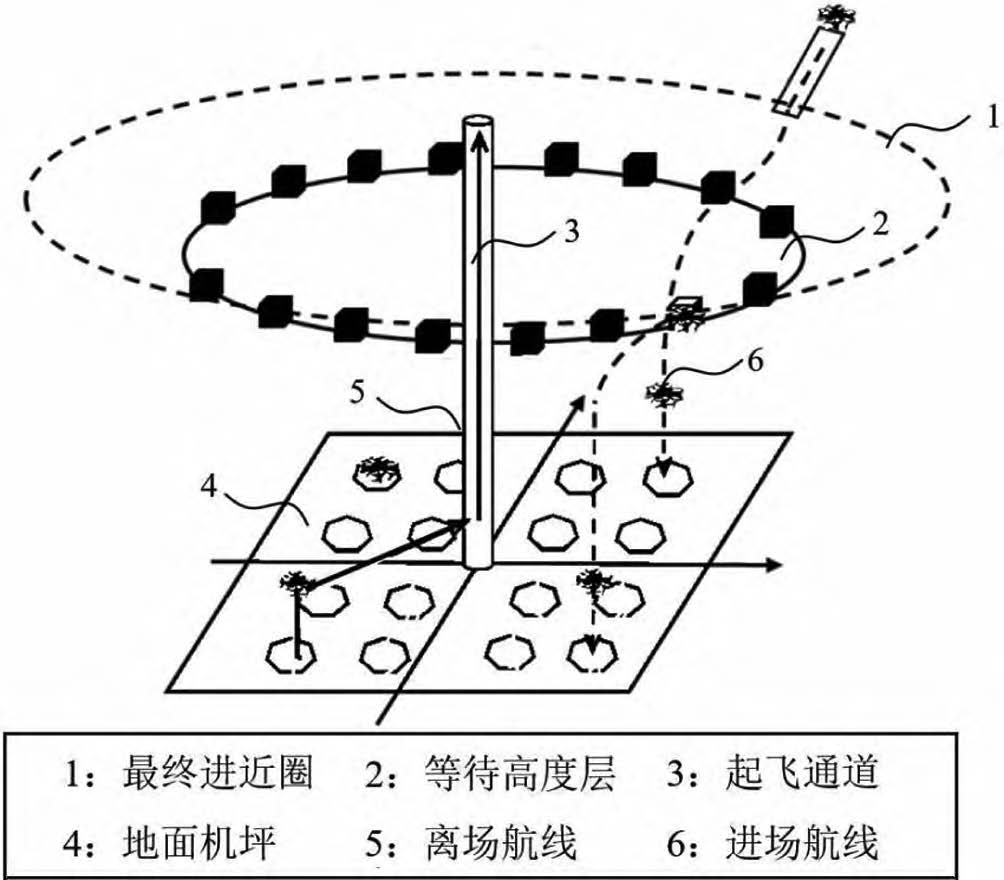
无人机进离场示意图(图源网络)
3.低空基础设施布局优化
除起降场外,低空经济还需要充电站、维护基地、通信基站等地面配套设施。这些设施的位置选择应考虑其所在位置的风沙侵蚀、积雪漂移等长期风致影响。CFD仿真可以评估不同布局方案下的设施暴露度与维护成本,辅助基础设施网络的空间优化决策。
低空经济基础设施建设(图源网络)
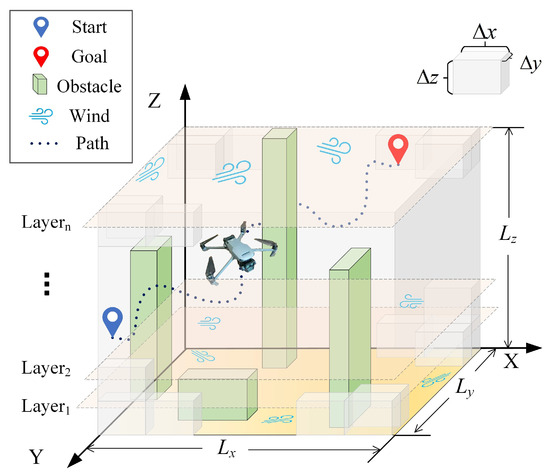
4.低空飞行器航线规划与风场感知
传统航线规划主要考虑障碍物避让与禁飞区约束,将风场视为静态背景或完全忽略。风场感知启用的航线规划,则将CFD预计算的风场分布图作为动态权重图层,嵌入路径搜索算法。飞行器在执行任务时,可根据实时风场数据调整航向与速度,规避强湍流区,利用顺风航段降低能耗。量化研究表明,考虑风场影响的路径规划可使地速提升6%以上、能耗降低7%以上。[1]
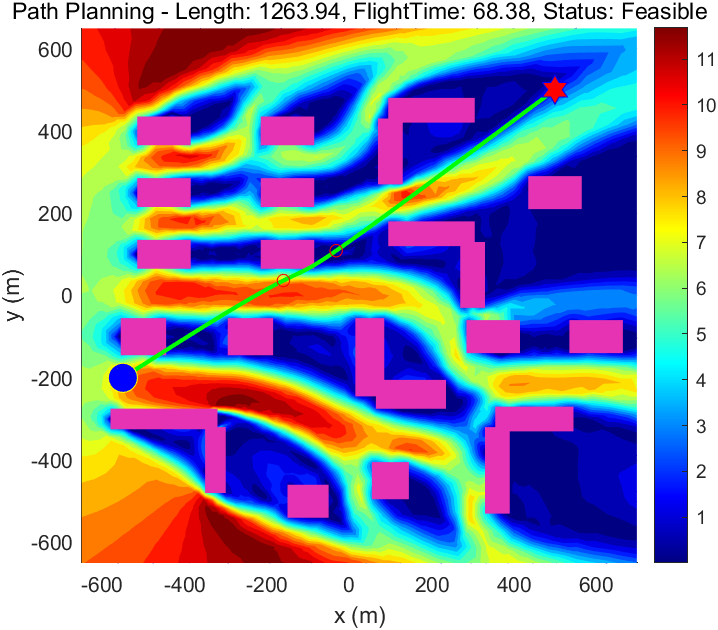
复杂城市风环境中的最终优化无人机航线(图源网络)
5.飞行器适航风洞测试
适航认证是低空飞行器商业化运营的法定前提。在风洞中模拟飞行器可能遭遇的极限风况(如侧风17m/s、阵风峰值等),测量其姿态保持能力与结构响应,是获取适航数据的核心手段之一。多风扇主动控制风洞可编程生成非定常、非均匀的风场剖面,比传统均匀风洞更贴近真实城市风环境。
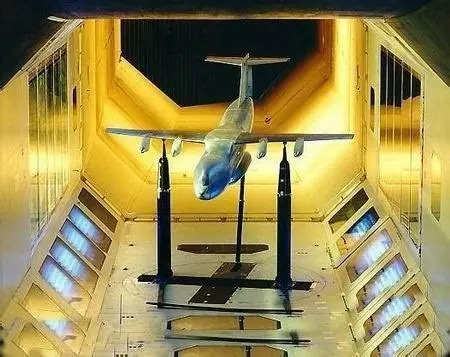
飞行器适航风洞测试(图源网络)
03 神工坊®应用案例
1.并行升级:智慧风场数字孪生平台
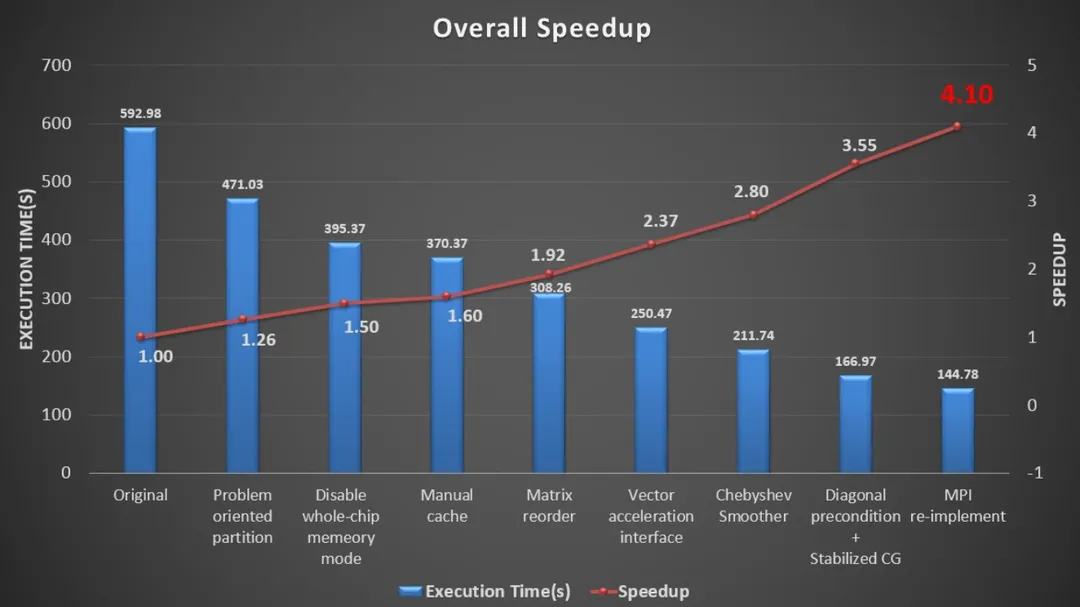
某风电整机领域的头部企业,在风电场开发与运营中积累了大量的风资源项目数据,但其对风场内局部复杂风场的精细模拟能力一直受限于传统仿真手段的精度与效率。为实现对风机排布区域风资源分布的高分辨率解析,企业需要构建能够精确刻画地形绕流、机组尾流及大气边界层风廓线的CFD仿真流程,以支撑风电场微观选址及后续的精细化运维。然而,其原有的软硬件环境难以满足大规模、高精度的风场仿真需求。
基于“超算+AI”混合数值引擎及SimForge™平台,神工坊®技术团队成功对其底层CFD求解器进行了高性能改造与云端部署,使得针对复杂地形的风场仿真计算效率整体提升了4.2倍。这一突破让风资源工程师得以在合理周期内,完成超过2000个风资源项目的精细化流场模拟,为每个机位点提供了准确的风速、湍流强度等关键输入参数。
此外,该企业还依托平台,自主研发了风功率预报系统——孔明。该系统已正式发布并推广,凭借其卓越的性能和实用性,已成为行业内的标杆应用。
2.应用定制:UAVSim 无人机仿真APP
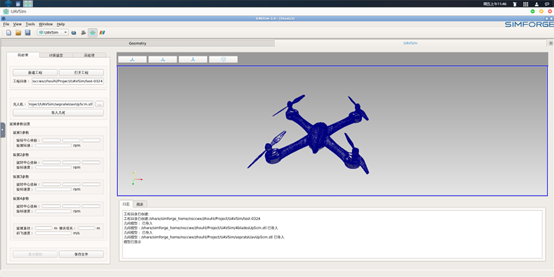
某无人机制造商在研发新一代无人机时,面临复杂城市环境下的气动仿真与飞行安全评估挑战,急需一款能够精准模拟无人机在低空复杂流场中行为的仿真软件。
神工坊®团队基于SIMFORGE HSF®“超算+AI”混合数值引擎,为其快速定制了一款高度易用、高效求解、精确可靠的无人机仿真App。该软件提供了完整的几何清理功能,通过自研网格模块根据无人机真实工况生成自适应网格,并采用LBM(格子玻尔兹曼方法)求解器,实现了对旋翼机体在各类风场条件下的高精度数值仿真。软件界面设计简洁直观,操作门槛低,产品经理也能快速上手完成仿真任务。
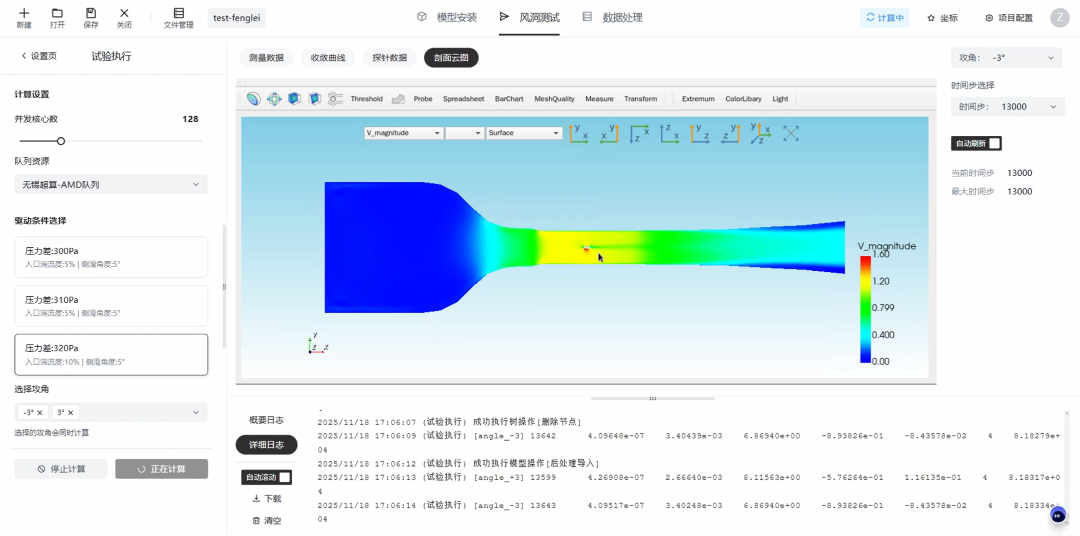
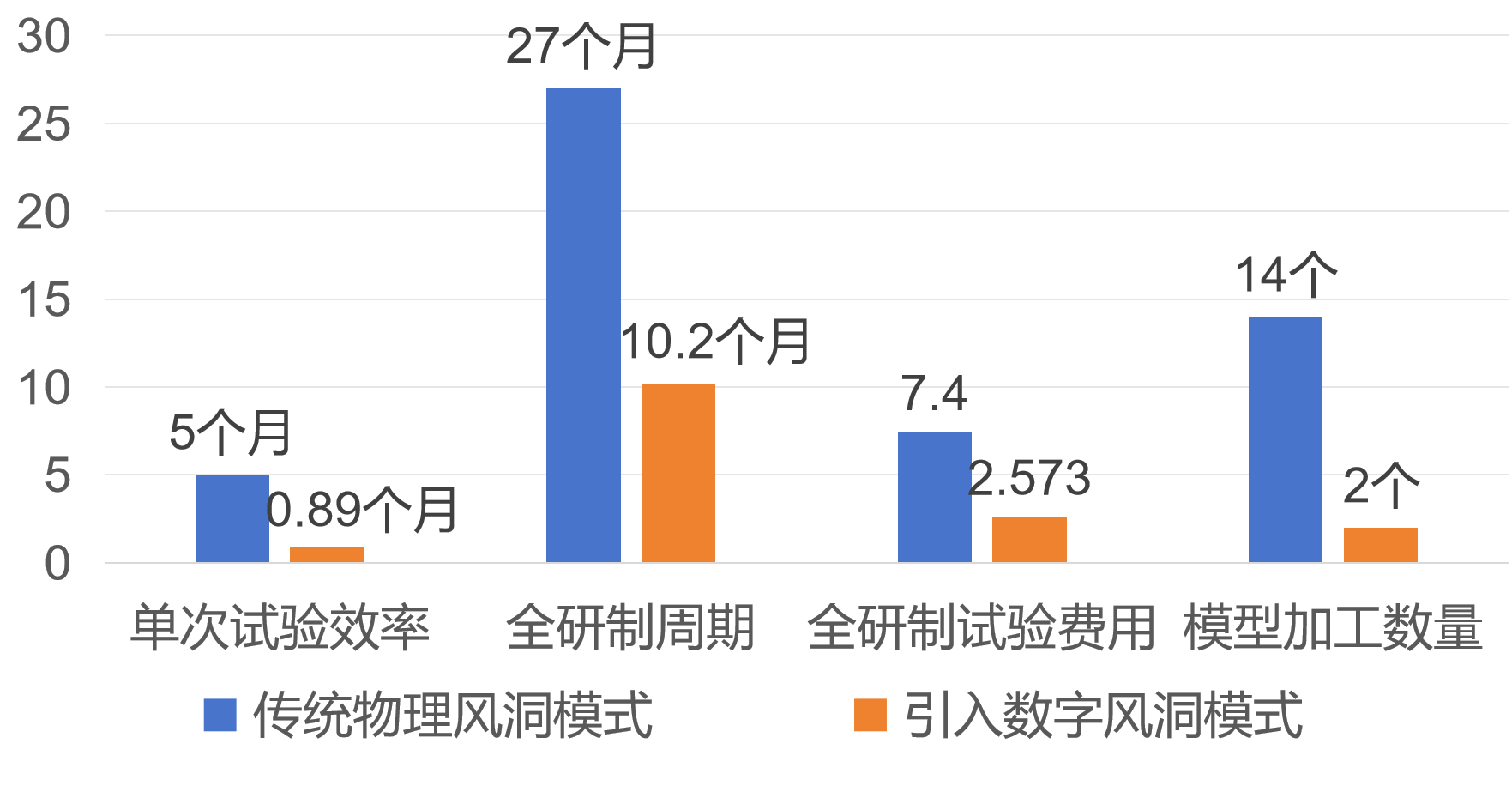
3.应用定制:“风神NF3”数字孪生风洞
随着装备研制技术发展,飞行器适航风洞验证需求旺盛。传统物理风洞试验虽具备高置信度,但存在周期漫长产能不足、排期拥堵(常以年计)、单次试验成本高昂、缩比模型难以完全复现真实流场等瓶颈,严重制约了研发效率。高端装备研发侧急需一种能够快速反馈、精度可比肩物理试验的数字化验证手段,以支撑高频次的设计迭代。
神工坊®针对上述困境及需求,依托“超算+AI”混合数值引擎基座及数字孪生实验设施产品生态,完成了“风神NF3”数字孪生风洞研发,实现了“虚实融合”的高效验证。综合测算显示,引入“风神NF3”数字孪生风洞,可缩短研制周期62.2%,降低相关试验费用65.2%。
04 结语
从破解城市低空湍流风险、保障飞行器安全起降,到优化航线能耗、提升物流运营效率,智慧风场仿真技术为低空经济提供了从“被动避险”转向“主动增效”的科学范式。
在国家大力发展低空经济的战略指引下,神工坊®将依托“超算+AI”混合数值引擎、数字孪生试验设施、SimForge™高性能仿真云平台三大核心产品,让风场仿真更高效地嵌入航线规划、起降场选址、适航认证等核心环节,推动构建“风场感知—气动仿真—航线优化”的技术闭环,为构建安全、高效、绿色的低空飞行生态奠定数字基座。

![[媒介矩阵版尾-2025].png](https://bexp.135editor.com/files/users/1466/14660444/202605/6ZuEnzOk_du8K.png?auth_key=1780243199-0-0-a54b2d598b6a9c3ff5fef2abf17a52b1)
参考资料:
[1] X. Chen, J. Zhang, and Y. Li, "Urban wind-aware path planning for unmanned aerial vehicles using computational fluid dynamics," Chinese Journal of Aeronautics, vol. 36, no. 8, pp. 245–258, Aug. 2023, doi: 10.1016/j.cja.2023.05.012.
[2] Lian, F., Li, B., Yang, Q., Zhu, H., & Du, D. (2025). WA-LPA*: An Energy-Aware Path-Planning Algorithm for UAVs in Dynamic Wind Environments. Drones, 9(12), 850. https://doi.org/10.3390/drones9120850
[3] 伏薇,李茂善,阴蜀城,等,2022. 西风南支与高原季风环流场下青藏高原大气边界层结构研究[J]. 高原气象,41(1):190-203.
[4] 钟若嵋, 廖小罕, 徐晨晨, 文小航. 2021: 京津冀地区无人机低空航路气象环境模拟研究. 气象科技进展, 11(4): 147-155. DOI: 10.3969/j.issn.2095-1973.2021.04.021
[5] J. Gao, X. Liu, Y. Xia, S. Shang, T. Pang and B. Yang, A Wind-Aware Path Planning Method for UAVs in Urban Environments, 2026 2nd International Conference on Electrical Automation and Artificial Intelligence (ICEAAI), Guangzhou, China, 2026, pp. 1-4, doi: 10.1109/ICEAAI68945.2026.11442519.





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




