【机器臂学习】六自由度机械臂动力学分析(扭矩计算)
浏览:1854
%%动力学
clc
clear all
close all
deg = pi/180;
%动力学连杆参数建模示意
L1= Revolute(‘d’, 0, ‘a’, 0, ‘alpha’, 0,‘modified’, …
‘I’, [0.1183 -0.0001 0.0001;
-0.0001 0.1182 0.0001;
0.0001 0.0001 0.0140], …
‘r’, [0.0002 0.0002 0.1264], …
‘m’, 5.6431, …
‘Jm’, 2.2e-4, …
‘G’, 81, …
‘B’, 1.48e-3, …
‘Tc’, [0.395 -0.435], …
‘qlim’, [-180 180]*deg ); 动力学代码仿真结果:
动力学代码仿真结果: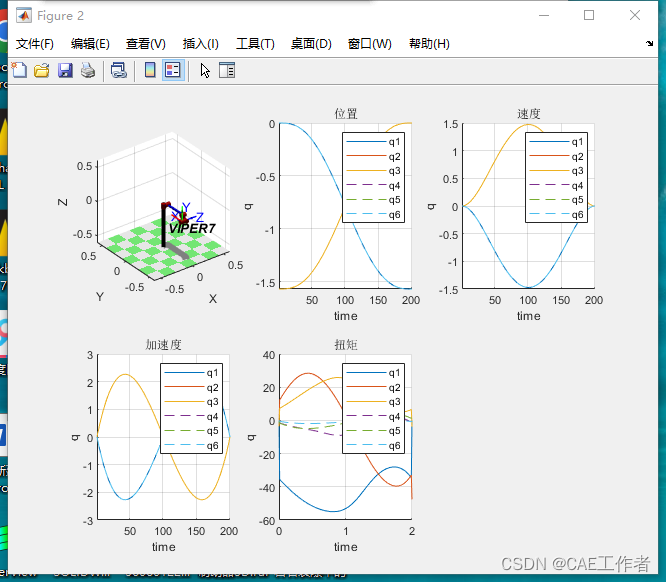
源代码见付费内容
以下内容为付费内容,请购买后观看
源代码





















技术邻APP
工程师必备
工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




