【机器人学习】六足机器人simulink仿真(运动学分析与步态仿真)
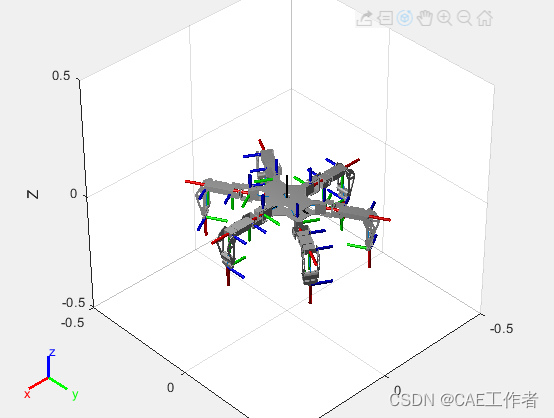
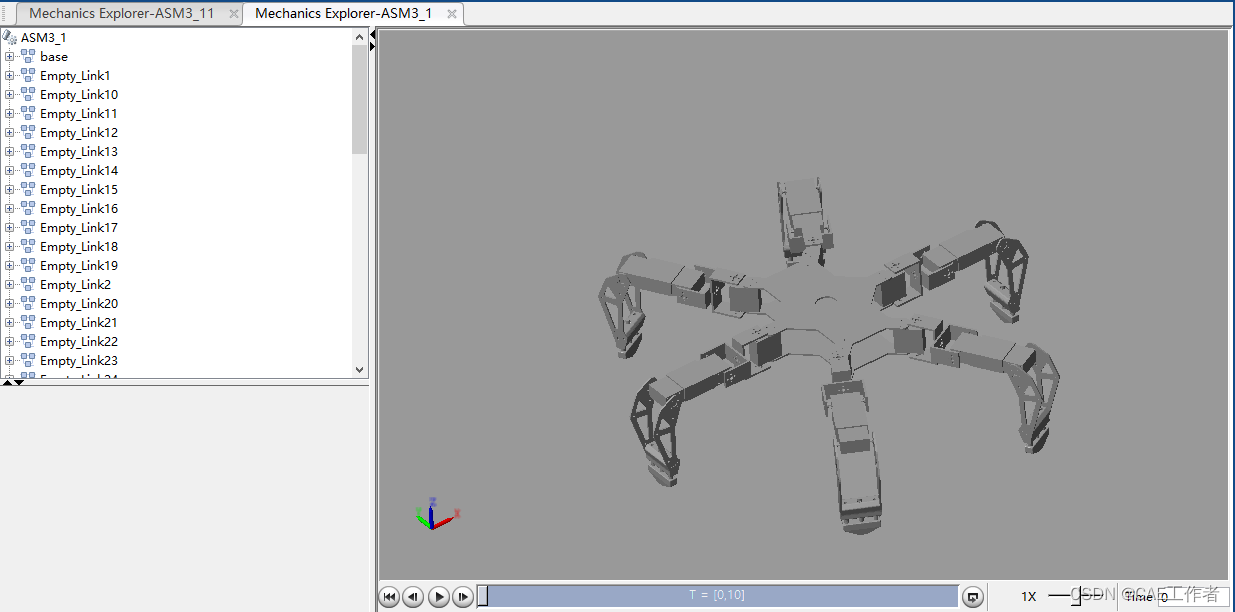
分析内容有:六角画圆,单腿画三角形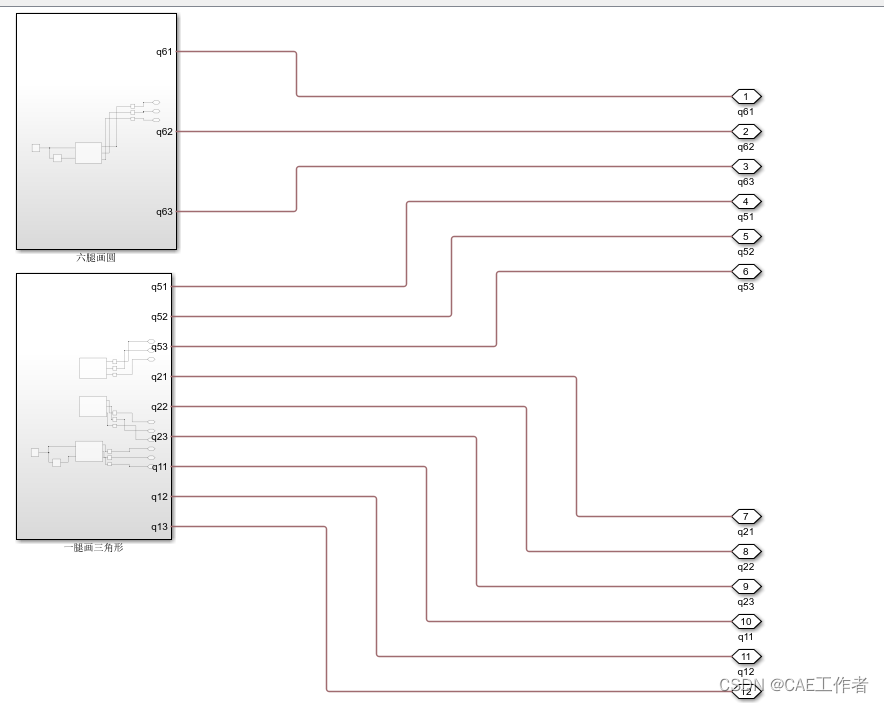
整体直行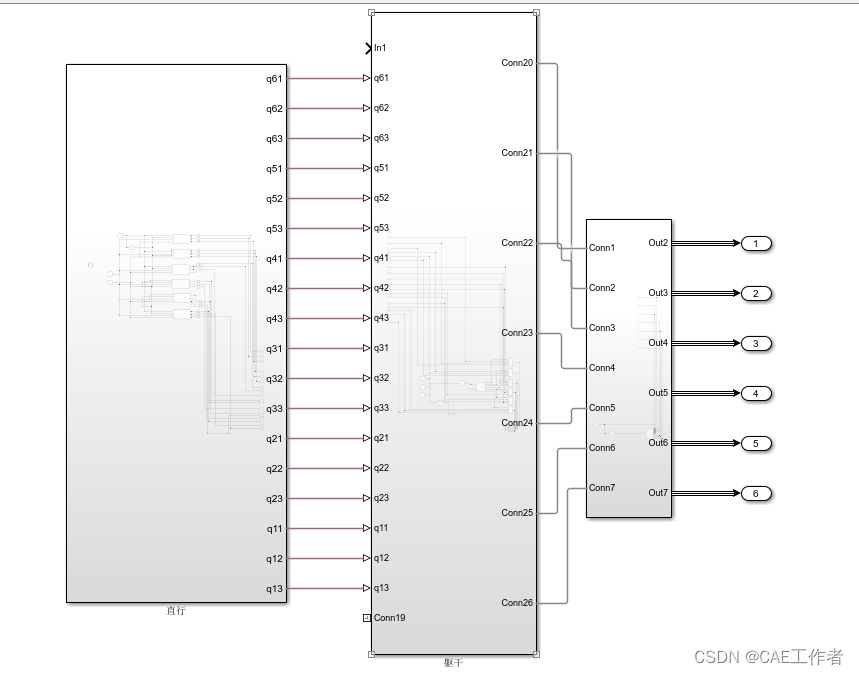
求逆函数代码:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%输入腿的足尖坐标和ID号即可得到腿的三个关节角%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function [q1 ,q2, q3] = ikinematics(x ,y, z, ID)
L0=1.3716;
L1 = 0.66;
L2 = 0.94;
L3 = 1.43;
if ID == 1
x0 = L0 * cos(1.0728);
y0 = L0 * sin(1.0728);
q1 = (atan(-(y-y0)/(x+x0)) - 1.0728) ;
X=x+x0+L1*cos(q1+1.0728);
Y= y-y0-L1*sin(q1+1.0728);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 =( acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5) );
q3 = 94/180*pi-acos((L2^2+L3^2-L^2)/(2*L2*L3));
end
if ID == 2
q1 =atan(-y/(x+1.16)) ;
X=x+1.16+L1*cos(q1);
Y= y-L1*sin(q1);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 =(acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5)) ;
q3 = -94/180*pi+acos((L2^2+L3^2-L^2)/(2*L2*L3));
end
if ID == 3
x0 = L0 * cos(1.0728);
y0 = L0 * sin(1.0728);
q1 =atan((x+x0)/(y+y0)) - 0.498 ;
X=x+x0+L1*sin(q1+0.498);
Y= y+y0+L1*cos(q1+0.498);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 = -( acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5) );
q3 = 94/180*pi-acos((L2^2+L3^2-L^2)/(2*L2*L3));
end
if ID == 4
x0 = L0 * cos(1.0728);
y0 = L0 * sin(1.0728);
q1 = atan(-(y+y0)/(x-x0)) - 1.0728 ;
X=x-x0-L1*cos(q1+1.0728);
Y= y+y0+L1*sin(q1+1.0728);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 = acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5) ;
q3 =-(acos((L2^2+L3^2-L^2)/(2*L2*L3))-94/180*pi);
end
if ID == 5
q1 =-atan(y/(x-1.16)) ;
X=x-1.16-L1*cos(q1);
Y= y + L1*sin(q1);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 = -( acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5) );
q3 = - (acos((L2^2+L3^2-L^2)/(2*L2*L3))-94/180*pi );
end
if ID ==6
x0 = L0 * cos(1.0728);
y0 = L0 * sin(1.0728);
q1 =atan((x-x0)/(y-y0)) - 0.498 ;
X=x-x0-L1*sin(q1+0.498);
Y= y-y0-L1*cos(q1+0.498);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 = -(acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5)) ;
q3 = 94/180*pi-acos((L2^2+L3^2-L^2)/(2*L2*L3));
end
end
需要技术服务联系qq2386317960
该付费内容为:源文件下载
包含1个附件 0人购买


















