有限元分析的底层逻辑是什么?
 2025年3月9日 13:00
2025年3月9日 13:00引言
在复杂函数的近似方法中,常见的有两种策略:
- 全域展开:例如,采用傅里叶级数展开。这种方法使用复杂的基函数在整个定义域上进行展开,能够高效地逼近复杂函数。然而,所采用的基函数通常较为复杂。
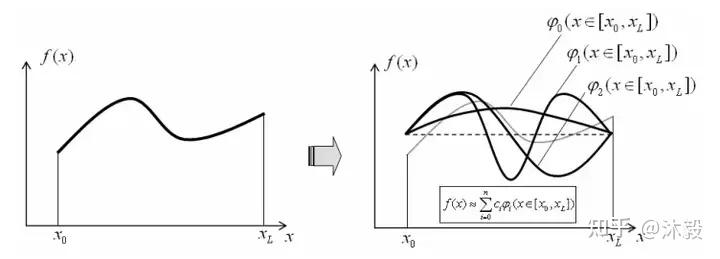
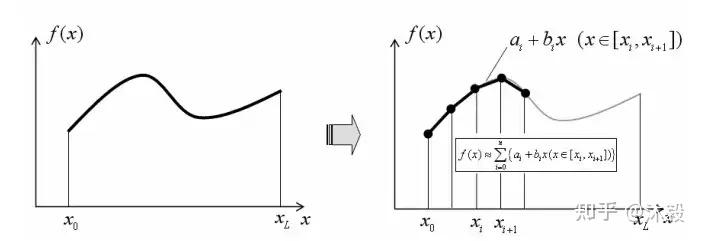
- 分段函数组合:例如,采用分段线性函数的连接。这种方法将定义域划分为多个子域,在每个子域上使用简单的基函数进行逼近。虽然基函数简单,且在子域上定义,但为了获得较好的逼近效果,可能需要使用大量的分段,导致计算工作量较大。 [图片] 有限元方法正是基于第二种策略,即通过将复杂问题划分为多个简单的“单元”,在每个单元上使用简单的基函数进行逼近,从而实现对复杂函数的有效近似。所以有限元分析的最主要内容,就是研究单元。
有限元分析的基本流程
具体而言,有限元分析的基本步骤包括:
1. 选择合适的单元类型
根据问题的维度(1D、2D或3D),选择不同的单元类型。例如,1D问题可以使用杆单元或梁单元,2D问题常用三角形或矩形单元,3D问题可以使用四面体或六面体单元等。这也是网格划分在有限元分析中比较重要的原因。
2. 建立单元的刚度矩阵
每个单元都有自己的刚度矩阵,它是基于单元的几何特征、材料属性和选择的插值函数(例如,线性、二次等)来构造的。刚度矩阵通常是通过能量原理来推导的,常用的方法有虚功原理、最小势能原理等。通过这些原理,可以导出单元内的平衡方程,从而得到单元的刚度矩阵。
下面简要介绍几种常见单元的刚度矩阵推导方法:
2.1 1D 单元(如杆单元)
对于二维问题,常用的单元包三角形单元(如3节点三角形单元)和矩形单元。
对于1D问题,常用的单元是杆单元(杆、梁等),它的刚度矩阵推导可以通过虚功原理来实现。 假设杆单元是线性的,材料为均匀弹性材料。 步骤:
- 位移场:假设单元内的位移场是线性的,可以表示为:
𝑢(𝑥)=𝑁1(𝑥)𝑢1+𝑁2(𝑥)𝑢2
其中 𝑁1(𝑥)
和 𝑁2
是形函数,𝑢1
和𝑢2
分别是单元两端的节点位移。那什么是形函数呢?,可见最后面附录说明。
- 应变能:通过应变能公式
𝑊=12∫𝐿𝜎(𝑥)𝜖(𝑥)𝑑𝑥
计算, 其中应变𝜖(𝑥)
和应力 𝜎
通过材料的杨氏模量 𝐸
和截面面积𝐴
表示。
- 刚度矩阵:将上述应变能公式转化为刚度矩阵形式,得到单元刚度矩阵:
𝑘=𝐸𝐴𝐿(1−1−11)
其中,𝐸
是杨氏模量, 𝐴
是截面面积,𝐿
是单元的长度。
2.2 2D 单元(如三角形单元)
三角形单元(线性单元)
假设一个简单的三角形单元有三个节点,节点1、节点2和节点3。其刚度矩阵的推导过程也采用能量原理。 步骤: - 位移场:假设每个节点的位移是线性插值的。位移场可以写作:𝑢(𝑥,𝑦)=𝑁1(𝑥,𝑦)𝑢1+𝑁2(𝑥,𝑦)𝑢2+𝑁3(𝑥,𝑦)𝑢3
其中𝑁1(𝑥,𝑦)
,𝑁2(𝑥,𝑦)
,𝑁3(𝑥,𝑦)
是形函数。 - 应变能:应变能是通过单元内的应变能密度(与应力和应变的关系)计算的。由于三角形单元涉及到二维应变,通常通过应变-位移矩阵来计算。 - 刚度矩阵:经过推导后,三角形单元的刚度矩阵为:𝑘=∫𝐴𝐵𝑇𝐷𝐵,𝑑𝐴
其中,𝐵
是应变-位移矩阵,𝐷
是材料的刚度矩阵,𝐴
是单元的面积。
三角形单元刚度矩阵(简化版)
对于简单的线性三角形单元,刚度矩阵一般可以通过以下积分公式推导:
𝑘=𝐴4(120−12012−12−12−1212)
其中𝐴
是三角形单元的面积。
2.3 3D 单元(如四面体单元和六面体单元)
在三维问题中,常用的单元有四面体单元和六面体单元。
四面体单元 四面体单元的推导较为复杂,通常需要通过形函数和积分来获得刚度矩阵。这里给出大致的推导思路。 步骤:
- 位移场:四面体单元的位移场是通过节点的位移进行插值,通常是多项式形式的。
- 应变能:通过应变-位移关系,计算应变能。应变-位移矩阵 𝐵
是由形函数的导数组成的。
- 刚度矩阵:同样利用应变-位移矩阵和材料刚度矩阵 𝐷
,通过积分得到四面体单元的刚度矩阵。
四面体单元的刚度矩阵一般较为复杂,具体计算通常依赖数值积分(例如高斯积分)。
每种单元的刚度矩阵的推导方法都是基于能量原理(如虚功原理、最小势能原理)或通过变分法进行的。1D单元的刚度矩阵推导较为简单,2D和3D单元则需要根据单元的具体几何形状和物理特性(如材料性质、形函数等)进行推导。
3. 单元刚度矩阵的组装
在构造出各单元的刚度矩阵之后,需要将它们根据结构中单元之间的连接关系组装成整体的刚度矩阵。组装过程通常依据节点的连接情况,将每个单元的刚度矩阵“嵌入”到整体的刚度矩阵中。
4. 整体刚度方程
组装完成后,得到的整体刚度方程为一个线性方程组,通常形式为
𝐾⋅𝑢=𝐹
其中 𝐾
是整体刚度矩阵,𝑢
是节点位移向量, 𝐹
是外力向量。通过解这个方程,就可以得到结构的位移解。
5. 边界条件的施加与解算
在整体刚度方程中,施加边界条件(例如,固定、力等),并解这个方程,从而得到结构的位移解,再通过位移解反求应力等其它物理量。
6. 求解方程组(Solution of the Equations)
使用数值方法(如高斯消元法、迭代法等)求解全局方程组,得到各节点的未知量(如位移、温度等)。求解过程的目的是获得系统的响应,进而分析其性能。
7. 后处理(Post-Processing)
对求解结果进行分析和可视化,如计算应力、应变等,评估结构或系统的性能。后处理的目的是从计算结果中提取有用信息,支持工程决策。
总结
通过以上步骤,有限元分析能够将复杂的物理问题转化为一系列简单的数学问题,从而实现对复杂工程问题的有效求解。
附录:
形函数(Shape Function)是有限元分析中的一个非常重要的概念,广泛应用于单元的刚度矩阵、应力、应变等计算中。形函数的作用是将每个单元的局部坐标系(如节点位移)映射到全局坐标系(整个结构的位移场),通过这种映射,能够描述单元内部任意位置的物理量(如位移、应力等)在有限元模型中的变化。
形函数的作用
- 表示节点间的位移关系:
- 形函数用来表示单元内的任意点的位移、应变等物理量如何与单元节点的位移、应变等相关。形函数通过节点位移的线性或高次插值,表示单元内部不同位置的位移、应变或应力。
- 构建单元刚度矩阵:
- 在有限元分析中,单元刚度矩阵的推导依赖于形函数。形函数决定了应变-位移矩阵的形式,进而影响单元的刚度矩阵。
- 映射局部坐标到全局坐标:
- 每个单元的位移是基于局部坐标系的,而形函数可以将这些局部坐标系的位移转换到全局坐标系,使得整个结构的分析可以统一在全局坐标系中进行。
形函数的种类
形函数的形式和种类通常与单元的维度和类型相关。以下是一些常见的形函数类型:
- 1D 单元的形函数
- 对于1D单元(如杆单元或梁单元),形函数通常是线性的,即每个节点的位移对单元内部的任意点的位移进行线性插值。
例如,对于一个线性2节点杆单元,其形函数𝑁1
和 𝑁2
可写为:
𝑁1(𝑥)=𝐿−𝑥𝐿,𝑁2(𝑥)=𝑥𝐿
其中L是单元长度,𝑥
是单元内部的任意位置。节点1和节点2的位移分别通过这两个形函数来插值。
2D 单元的形函数
对于2D单元(如三角形单元或四边形单元),形函数可以是线性的、二次的等。比如,线性三节点三角形单元的形函数可以表示为:
𝑁1(𝑥,𝑦)=1−𝑥−𝑦,𝑁2(𝑥,𝑦)=𝑥,𝑁3(𝑥,𝑦)=𝑦
其中(𝑥,𝑦)
是局部坐标,𝑁1,𝑁2,𝑁3
是对应节点的形函数。 对于更高次的单元(例如二次三角形单元或四边形单元),形函数会包含更多的项,能更精确地插值单元内部的位移场。
3D 单元的形函数
对于3D单元(如四面体单元或六面体单元),形函数通常是多项式的,表示每个节点的位移如何在单元内部进行插值。例如,四面体单元的形函数形式通常为:
𝑁1=16(1−𝜉−𝜂−𝜁),𝑁2=16(1+𝜉),𝑁3=16(1+𝜂),𝑁4=16(1+𝜁)
其中𝜉,𝜂,𝜁
是局部坐标。
形函数的关键特性
形函数值在节点处为1:
在每个节点处,形函数的值为1,其他节点的形函数值为0。即对于一个三节点单元,节点1的形函数𝑁1
在节点1处为1,在其他节点处为0。这样,单元内任意位置的物理量可以通过节点值进行插值。
形函数在单元内的插值性质:
形函数是单元内部物理量变化的插值函数,能够将节点的物理量(例如位移)转化为单元内部的物理场(例如位移场)。
形函数的连续性:
形函数在单元内通常是连续的,尤其是线性单元,其形函数在单元的边界和内部都是连续的。对于高阶单元,形函数在节点间的变化更加平滑,能够更好地描述非线性变形。 形函数是有限元分析中描述单元物理量分布的基础工具,它决定了单元的刚度矩阵、质量矩阵等的计算方式。通过形函数,可以将单元内的物理量(如位移、应力、应变等)与节点的物理量(节点位移、节点力等)之间建立数学关系,从而解决整个结构的分析问题。





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




