人形机器人关节「心脏」大揭秘!特斯拉 / 小米 / 宇树核心技术哪家强?
 2025年5月20日 10:16
2025年5月20日 10:16浏览:2462 评论:1
人形机器人的核心动作能力高度依赖于关节电机的性能。这些电机不仅要提供动力,还要精准控制动作。目前,人形机器人关节电机的主流技术方案主要包括无框力矩电机与空心杯电机、谐波减速器与行星减速器、力传感器与电流环控制等。本文将对这些技术方案进行对比分析,并探讨未来的发展趋势。
(一)关节电机技术方案对比
无框力矩电机 VS 空心杯电机


谐波减速器 VS 行星减速器


力传感器 VS 电流环

(二)技术路线分析

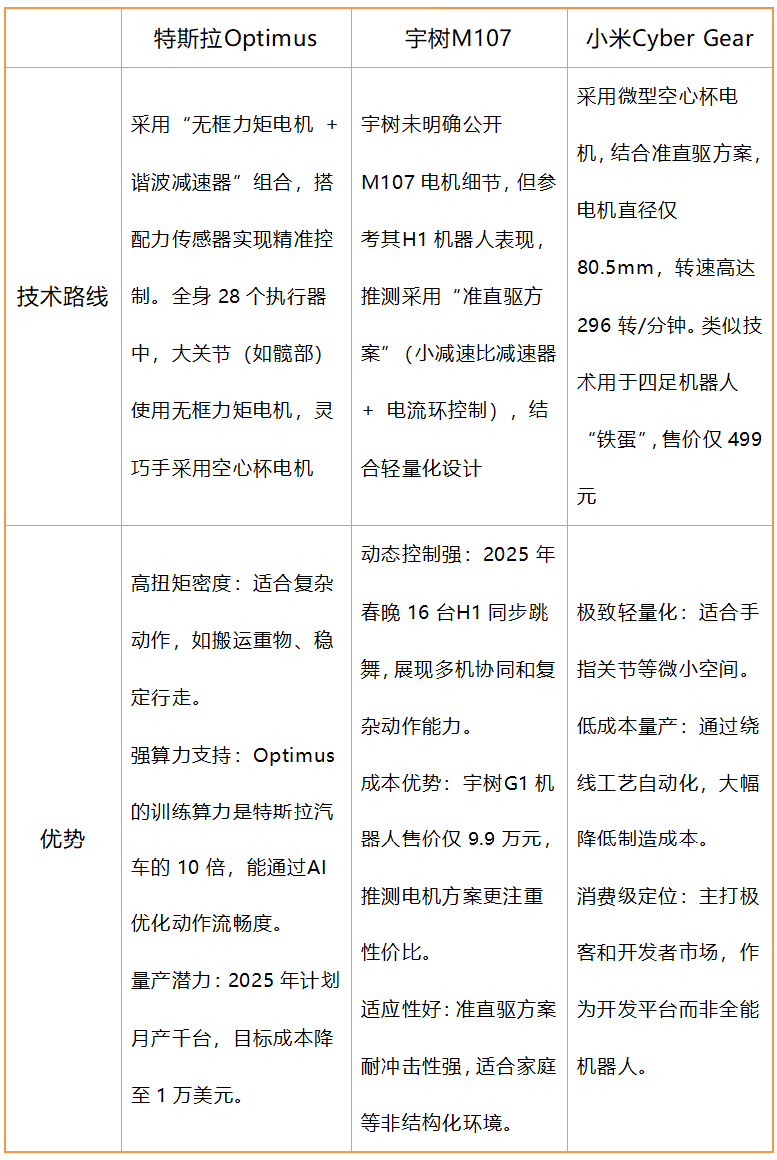
总的来说,特斯拉目前追求工业级性能,适合未来工厂、家庭助手等高端场景,但成本较高;宇树则平衡性能与价格,瞄准教育、娱乐等中端市场;小米以低价推动普及,通过生态链扩展应用(如智能家居联动)。随着《人形机器人电驱动一体化关节接口规范》标准2025年立项,电机与减速器的兼容性将提升,国产替代加速。而轴向磁通电机、更高精度传感器的应用,可能进一步突破现有技术瓶颈。
更多精彩,敬请关注























技术邻APP
工程师必备
工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP


2

1

