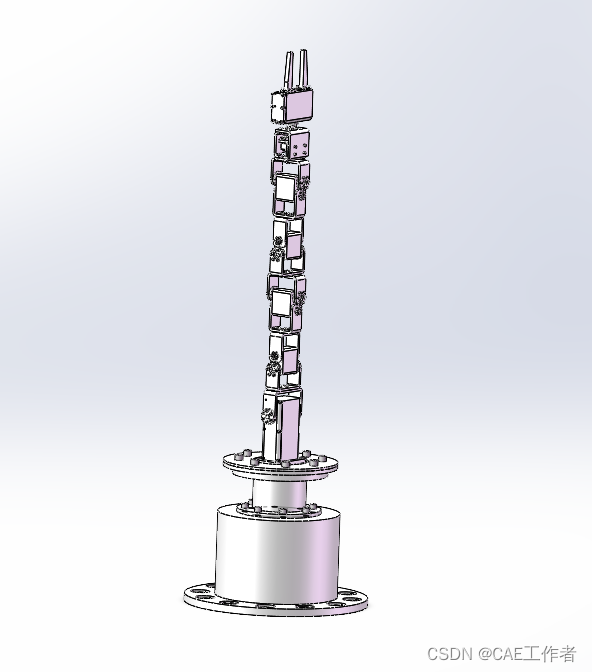
【机器臂学习】蛇形机械手(七自由度)D-H建模、正运动学分析与轨迹规划
clear;
clc
close all
% theta d a alpha qlim offset
L(1) = Link( ‘d’, 0.49825 , ‘a’ , 0 , ‘alpha’, pi/2 ,‘offset’,0);
L(2) = Link( ‘d’, 0 , ‘a’ , 0.122 , ‘alpha’, 0 , ‘offset’,pi/2);
L(3) = Link( ‘d’, 0 , ‘a’ , 0.192 , ‘alpha’, pi/2 , ‘offset’,0);
L(4) = Link( ‘d’, 0 , ‘a’ , 0.122 , ‘alpha’, pi/2 , ‘offset’,0);
L(5) = Link( ‘d’, 0 , ‘a’ , 0.192 , ‘alpha’, pi/2 , ‘offset’,0);
L(6) = Link( ‘d’, 0 , ‘a’ , 0 , ‘alpha’, pi/2 , ‘offset’,pi/2);
L(7) = Link( ‘d’, 0.341 , ‘a’ , 0 , ‘alpha’, 0 , ‘offset’,0);
robot = SerialLink(L, ‘name’ , ‘机器人’); %建立七自由度模型
robot.display(); %显示建立的机器人的DH参数
robot.teach; %画出模型并进行调控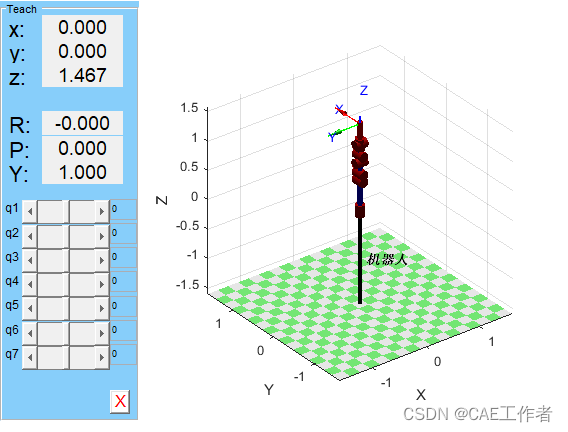
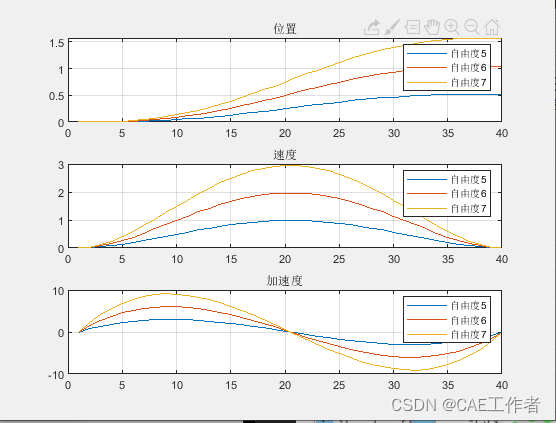
五次多项式曲线轨迹规划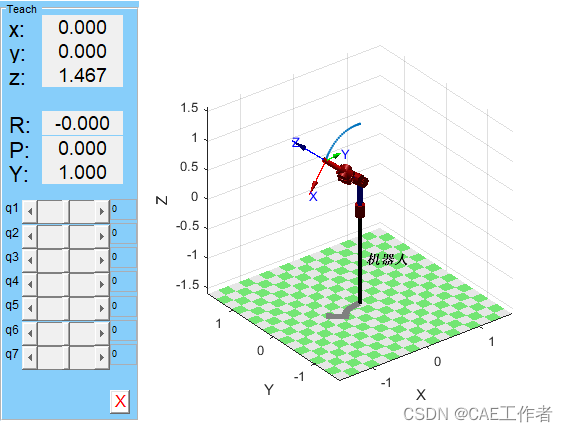
以下内容为付费内容,请购买后观看
模型与源代码





















工程师必备
- 项目客服
- 培训客服
- 平台客服
TOP




