注册
/
登录


全部分类
文章
视频
问答
最新发布最新评论
什么是无人机叶片的颤振 叶片颤振属于流体诱发振动现象,是叶片振动的一种形式。具体而言,弹性体的叶片在气动力作用下形成的气弹耦合的自激振动,称为颤振。随着无人机叶片性能的不断提高,气动极限负荷增大,叶片往往设计得薄而长,刚性下降,这导致叶片颤振发作的几率增多。 无人机叶片颤振的影响 叶片颤振一旦发作,会产生大振幅的剧烈振动,这种振动对叶片的影响主要有以下几个方面: 疲劳损坏:大振幅的振动会使叶片在短

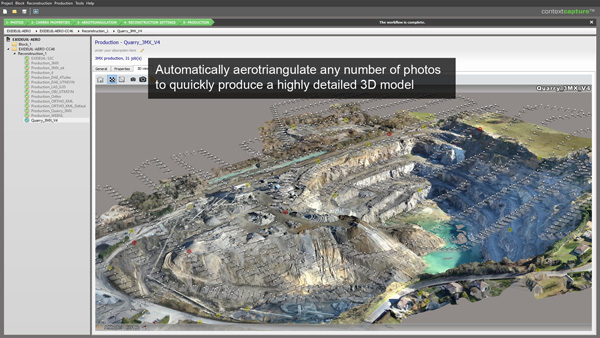
倾斜摄影建模应用越来越广泛,例如 - 城市三维建模: 使用倾斜摄影技术可以获取建筑物、道路等城市环境的高精度三维模型,为城市规划、地理信息系统(GIS)等领域提供支持。 - 土地管理和规划: 通过倾斜摄影,可以获取大范围土地的高分辨率影像,用于土地利用规划、土地管理和监测。 - 基础设施监测: 对于基础设施如桥梁、管道、电力线路等的监测和维护,倾斜摄影提供了高分辨率、立体感强的影像数据,有助于检测
要在全面梳理“低慢小”无人机探测方法的基础之上,可对各种探测原理进行分析比对,结合市场的信息、实验研究、仿真验证等信息,总结出解决“低慢小”无人机探测问题的三个发展趋势移动探测、融合探测和跟踪探测。西安知语云智能科技有限公司具有十几年的专业低慢小无人机反制监测预警干扰打击设备 目前,能够在应用于探测“低慢小”无人机的方法,从而信号形式上主要包括雷达探测、激光探测、金属探测、光电探测、无线电探测和声

摘 要: 对多旋翼无人机的结构振动问题进行了设计研究。在小型多旋翼无人机上,激光振动仪验证了加速度传感器测量振动的可靠性,发现圆形碳纤维臂具有较强的阻尼能力,z轴方向振动最强。实验表明,多旋翼无人机臂的主要振动为300 Hz以下的低频振动,主要产生扭转和弯曲模态。该研究还提出了一种抑制多旋翼无人机振动的改进策略。 关键词:多旋翼无人机;结构振动;低频;扭转模态;弯曲模态; 现在无人机系统正朝着提高

摘 要:【目的】铝合金起落架在使用过程中,由于其具有质量高的特点会给无人机带来很多不必要的动能损耗。【方法】课题组以某型号的植保无人机为研究对象,通过制作材料的平替和优化结构设计,使其达到使用要求。对无人机起落架进行UG设计建模以及ANSYS有限元分析,得到起落架对应的应力云图和变形云图。材料平替过程中,质量由铝合金的0.86kg下降到了稀土镁合金的0.68 kg,质量降低0.18 kg。【结果】

X03无人机中心盘,在顶载荷时的受力分析: 顶部是由两侧各两个螺纹孔来连接支架,支架作为置物架用来顶载重物。现设顶载重物为3KG,设上壳的支撑是落在六只机臂上的。9.8N/KG*3KG=29.4N SW 位移,合位移量max:1.848e-03mm ANSYS 材料: 最大形变量:1.3552e-03mm 两者分别为1.848e-03mm和1.3552e-03mm,最大变形量有区别。 最大的变形位

静止空气中六旋翼飞行状态下对周边气流影响分析 考虑挂载载荷时飞机重量为12kg,动力系统提供12kg拉力时每个电机承载约2kg拉力,对应转速n=3742r/s。 图1 六旋翼无人机图 在SolidWorks中简化模型,分析单一桨叶在正常大气压和气温下,输出的扰流结果。参数设置为:环境压力101.325kpa;桨叶转速3742r/s;空气流速0.1m/s。 图2 单桨叶旋转流场图 扩大计算域,显示单

无人机抛装置到地面,如何让装置稳定的固定到地面不动?说明一下装置是顶端是天线,中间有一个探测仪,探测仪下面是一个三脚架固定,主要问题是如何才能保证无人机抛投时三脚架固定于地面?
考虑一下不倒翁原理
随着无人机技术的快速发展,无人机市场正在兴起并扩大,无人机在军用和民用领域均取得蓬勃发展。 民用领域,无人机在农林植保、抢险救灾、物流运输、安防巡检等方面发挥了重要作用。 军用领域,无人机因拥有高空、高速、隐身、长航时等特性,在战场监视、情报搜集、电子侦察、指控通信、电子攻击、火力打击等领域承担起越来越重要的任务。 与此同时,无人机的威胁和风险也逐渐显露出来。 近几年,在国外的军事基地、核电站、油
自俄乌冲突以来,俄军虽然在战场上使用了国产自杀式无人机,如“柳叶刀”、KUB等系列无人机,但是俄罗斯遭到欧美制裁后,无人机关键零备件或芯片严重不足,导致国产无人机总体数量不能满足作战部队需求。鉴于上述原因,俄罗斯引入伊朗无人机用以补充俄军一线作战部队的需求。 伊朗从简单、轻型无人机系统起步,迄今为止已经生产了包括轻型战术侦察无人机到重型察打一体等主要类型的无人机,种类齐全。伊朗无人机领域的飞速进步
摆脱欧洲对美以无人机的依赖 综合西班牙人(EL ESPAÑOL)、欧洲国防工业网站(Defence Industry Europe)的报道: 7月25日,西班牙部长理事会批准西班牙国防部与空客防务与航天公司签订采购SIRTAP无人机的合同,合同价值约5.95亿欧元(6.58亿美元),这笔款项“将在2023年至2031年间分为8次年度分期付款”。 该合同包括提供9套完整的SIRTAP无人机系统(每个
各行各业的企业都在利用无人机自动化系统来提高其运营的效率和有效性。无人机凭借着出色的飞行能力以及载荷功能,有着非常广泛的功能,在各行各业发挥着很大的作用。 无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。 农业方面 中国作为农业大国,拥有18亿基本农田,每年需要大量的农业植保作业,现在无人机在农业
作者 昂海松 王源 1 引 言 当前,无人机军民用技术发展越来越快,应用领域也越来越广。虽然无人机在陆地领域的用途已日益普及,但是在广大的海洋领域,还有巨大的应用空间。由于无人机的机动性和使用便捷性,在海岸、海洋资源、水空监视和海事监测等领域也开始运用无人机技术。 基于小型无人航行器体积小、重量轻、布放与运行方便、隐蔽性好、成本低、连续工作时间较长、可回收等优点[1],本文着重研究具有一定航程及任
旋翼无人飞行器具有垂直起降/着陆、可悬停、机动性好及结构简单等多种优点,无论是在军事领域还是民用领域,都有非常广泛的应用价值。 作为垂直/短距起降飞行器,多旋翼无人飞行器不受起降场地的限制,具有很强的适应性,一直是各国军方关注的焦点。多旋翼无人飞行器与常规的飞行器相比,具有垂直起降、着陆、悬停、纵飞和侧飞等飞行特性。随着近年来微电子、微机械、计算机技术及电池等技术的飞速发展,小型四旋翼无人机的体积
引言 随着科学技术的快速发展,无人机在许多领域得到了成功的应用 [1] 。目前无人机主要执行的是航拍、监测环境、农业植保等任务载荷,且大部分无人机以多旋翼为主。多旋翼无人机是靠螺旋桨转速的变化,来调整力和力矩的,实现多旋翼无人机的飞行运动控制。对多旋翼无人机的桨叶来说, 一方面,桨叶尺寸越大,越难以迅速改变其速度。也正是因为如此,无人直升机主要是靠改变桨距而不是速度来改变升力。另一方面,在大载重下
无人机航拍摄影是以无人驾驶飞机作为空中平台,以机载遥感设备,如轻型光学相机、红外扫描仪,激光扫描仪、磁测仪等获取信息,用计算机对图像信息进行处理,并按照一定精度要求制作成图像的技术。它具有高清晰、大比例尺、小面积、高现势性、小型轻便、高效机动的优点,起飞降落受场地限制较小,在操场、公路或其它较开阔的地面均可起降,其稳定性、安全性较好,而且转场非常容易,广泛应用于国家生态环境保护、矿产资源勘探、自然
一、 飞行仿真技术简介 系统仿真,是将被研究的对象按其特征抽象成模型,通过对模型的仿真操作及仿真结果的分析,探讨和推断对象本身所具有的性质及其运动变化规律的一门综合性学科。当今世界,随着军事和科学技术的迅猛发展,仿真已成为各种复杂系统研制工作的一种必不可少的手段,据统计,采用系统仿真后,可使靶弹、实弹减少6%—30%,研制费用节省10%—40%,研制周期缩短30%—40%,尤其是在航空航天领域,仿
遥控器用于用户手动操纵指令传达。除此之外,四旋翼无人机还需要与地面站或其他四旋翼有数据交互,用于状态监控,集群协同等 一 硬件与协议 无人机与外界通信主流方案包括三种:WiFi,蓝牙,2.4G无线数传。其中WiFi与蓝牙也是传输信号也在2.4G频段,一般硬件设备都内置有WiFi,蓝牙功能,2.4G收发端都需要额外配置模块 也有部分数传模块可以工作在433MHz、915MHz频段,相同功率,频率低衍
21世纪初,军用无人系统的部署和使用已成为发达国家提升部队作战能力的一个决定性因素。目前,无人系统正在从新质武器的形成阶段向部署应用的强化阶段过渡。 一、地面、空中和海上无人系统应用现状 目前,大多数无人系统的应用任务仍然是战术性的,军事无人系统集群应用的指挥和控制也仍然处于战术层面。随着许多国家在一系列无人系统的决定性技术领域取得了多项重大突破,预计在未来10到15年内,无人系统对战术任务和战略
“ 四旋翼无人机的飞行原理 直升机有尾旋翼的设计是为了抵消主旋翼旋转时产生的旋转力矩,如果没有尾旋翼直升机的机体会向着主旋翼旋转方向相反的方向自旋。而四旋翼无人机采用十字型对称分布,四个旋翼互相抵消回旋影响,当平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。如果想转向的话,只要打破这个平衡就可以了。 按照图中的旋转方向,增加 1、4 的转速减少 2、3 的转速可以产生逆时针转动;反之,减少 1、4
热榜
1月1年全部
文章
视频
问答
1月1年总榜